
電子電氣架構包含了車上所有的硬件、軟件、傳感器、執(zhí)行機構、電子電氣分配系統(tǒng),電子電氣架構是通過系統(tǒng)集成化的工具把這所有的內容整合到一起。其技術演進有四個關鍵趨勢:計算集中化、軟硬件解耦化、平臺標準化以及功能開發(fā)生態(tài)化。智能化與網(wǎng)聯(lián)化共同推動了汽車電子電氣架構的變革,一方面是車內網(wǎng)絡拓撲的優(yōu)化和實時、高速網(wǎng)絡的啟用,另一方面是ECU(電子控制單元)的功能進一步集成到域控制器甚至中央計算單元。
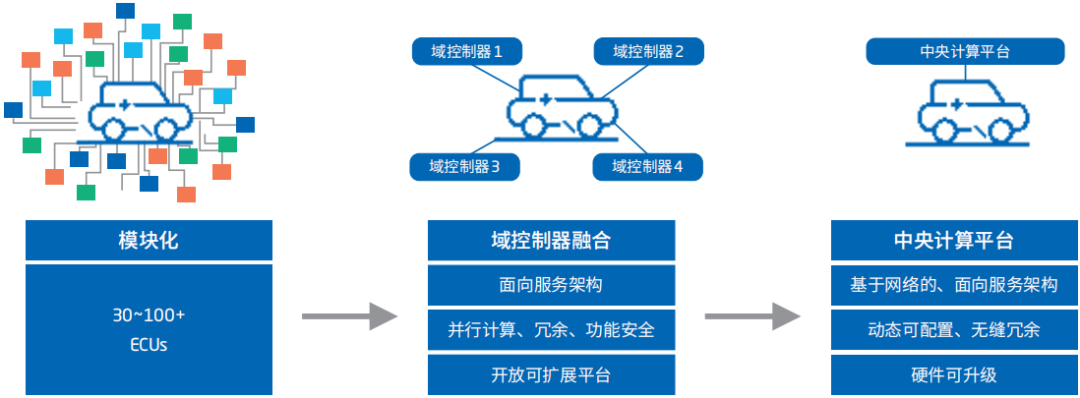
汽車電子電氣架構轉變趨勢示意圖
汽車電子底層硬件不再是由實現(xiàn)單一功能的單一芯片提供簡單的邏輯計算,而是需要提供更為強大的算力支持;軟件也不再是基于某一固定硬件開發(fā),而是要具備可移植、可迭代和可拓展等特性。汽車原有以ECU為單元的研發(fā)組織將發(fā)生轉變,形成通用硬件平臺、基礎軟件平臺以及各類應用軟件的新型研發(fā)組織形態(tài)。
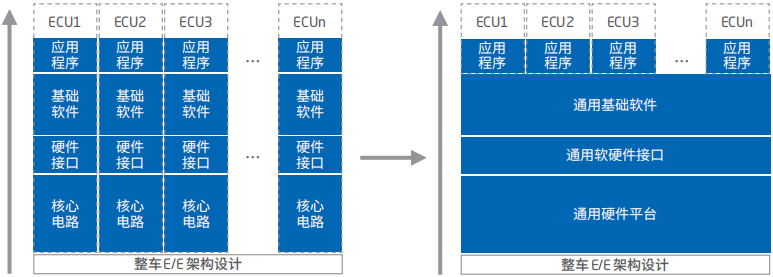
汽車電子電氣架構開發(fā)方式轉變趨勢示意圖
新勢力、部分自主車企已率先進入域集中架構階段,合資、外資車企陸續(xù)跟進。“蔚小理”、上汽等頭部企業(yè)開始嘗試探索跨域融合 架構與中央計算架構。隨著主機廠對于車載智能計算平臺的發(fā)力,2023年將是主機廠量產下一代“整車集中+區(qū)域控制方案”的關鍵 時間節(jié)點。行泊一體功能的火爆使域控制器的重要性得到驗證,目前國內已有多家企業(yè)發(fā)布了相關產品,并持續(xù)深耕更具有性價比的產品方案, 做到“腳踏實地”。2023年隨著更高級別智能駕駛功能的量產以及更具智能化的座艙產品推出,跨域高性能計算平臺(HPC)成為智 能電動汽車產業(yè)上下游接下來所關注的核心模塊,開始“仰望星空”。 主機廠對于車載智能計算平臺的關注度逐漸提高,使本土供應商在2023年有望憑借車載智能計算平臺獲得先發(fā)優(yōu)勢與彎道超車的最佳 機遇。整車E/E架構的終局——中央計算尚未實現(xiàn)。
車載智能計算平臺分為軟硬件架構
車載智能計算平臺的功能實現(xiàn)需要豐富的硬件資源和復雜的軟件支持。不同硬件資源的集成形成計算平臺的硬件架構,將復雜的軟件分層化處 理構成了計算平臺的軟件架構。計算平臺硬件架構中的主控芯片集成了多個和多類計算單元,如CPU、GPU等,通常還包含了音頻、多媒體、 顯示、安全、通信、AI計算等子單元,不同種類的計算單元有各自的優(yōu)勢,分別負責不同任務。
軟件架構包括系統(tǒng)軟件、功能軟件以及上層的應用軟件。系統(tǒng)軟件負責承上啟下,實現(xiàn)應用軟件與物理硬件分離;功能軟件為智駕、座艙功能 提供共性功能模塊;應用軟件實現(xiàn)具體智駕、座艙功能,開發(fā)者可根據(jù)自身產品功能定義,利用功能軟件層提供的基礎庫,設計具體應用功能。
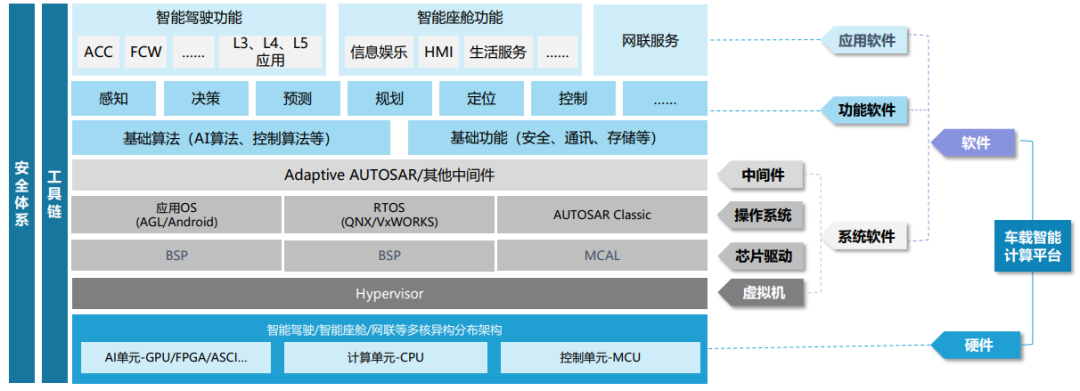
智能電動汽車車載智能計算平臺架構 圖源:億歐智庫
系統(tǒng)軟件即操作系統(tǒng),是管理和控制智能汽車硬件與軟件資源的底層,提供運行環(huán)境、運行機制、通信機制和安全機制等。目前車載操作系統(tǒng)可分為四個層次:基礎型操作系統(tǒng)、定制型操作系統(tǒng)、ROM型操作系統(tǒng)和中間件。
基礎型操作系統(tǒng)包括系統(tǒng)內核、底層驅動等,提供操作系統(tǒng)最基本的功能,負責管理系統(tǒng)的進程、內存、設備驅動程序、文件和網(wǎng)絡系統(tǒng),決定著系統(tǒng)的性能和穩(wěn)定性;目前底層操作系統(tǒng)為開源框架,暫不受版權和知識產權的影響,一般不屬于企業(yè)考慮開發(fā)的技術范圍。定制版操作系統(tǒng)則是在基礎型操作系統(tǒng)之上進行深度定制化開發(fā),如修改內核、硬件驅動、運行時環(huán)境、應用程序框架等,屬于自主研發(fā)的獨立操作系統(tǒng)。ROM則是基于發(fā)行版修改后的系統(tǒng)服務與系統(tǒng) UI。ROM型汽車操作系統(tǒng)是基于Linux或安卓等基礎型操作系統(tǒng)進行有限的定制化開發(fā),不涉及系統(tǒng)內核更改,一般只修改更新操作系統(tǒng)自帶的應用程序等。大部分的主機廠一般都選擇開發(fā)ROM型操作系統(tǒng),國外主機廠多選用Linux作為底層操作系統(tǒng),國內主機廠則偏好Android應用生態(tài)。中間件是處于應用和操作系統(tǒng)之間的軟件,實現(xiàn)異構網(wǎng)絡環(huán)境下軟件互聯(lián)和互操作等共性和問題,提供標準接口、協(xié)議,并具有較高的移植性。目前國內廠商在中間件上的發(fā)展較為先進,致力于在E/E電子架構變革中提供可過渡的解決方案。
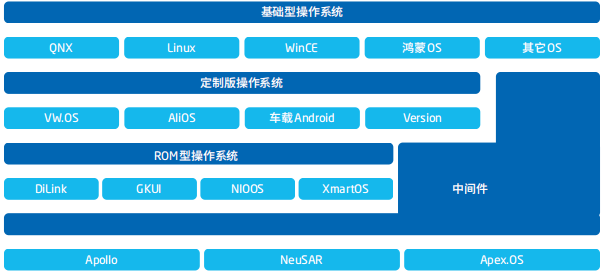
系統(tǒng)層軟件架構示意圖
自動駕駛的基本過程分為三部分:感知、決策、控制。其關鍵技術為自動駕駛的軟件算法與模型,通過融合各個傳感器的數(shù)據(jù),不同的算法和支撐軟件計算得到所需的自動駕駛方案。自動駕駛中的環(huán)境感知指對于環(huán)境的場景理解能力,例如障礙物的類型、道路標志及標線、行車車輛的檢測、交通信息等數(shù)據(jù)的分類。定位是對感知結果的后處理,通過定位功能幫助車輛了解其相對于所處環(huán)境的位置。環(huán)境感知需要通過多傳感器獲取大量的周圍環(huán)境信息,確保對車輛周圍環(huán)境的正確理解,并基于此做出相應的規(guī)劃和決策。
目前自動駕駛技術路線分為兩種,一種即以激光雷達等多傳感器融合為代表的路線,另一種是以特斯拉為代表的純視覺路線。純視覺路線以攝像頭為主導,成本較低,但由于攝像頭精確度較低,對算法和計算能力的要求更高。其他傳感器為輔助的技術方案。決策是依據(jù)駕駛場景認知態(tài)勢圖,根據(jù)駕駛需求進行任務決策,接著能夠在避開存在的障礙物前提之下,通過一些特定的約束條件,規(guī)劃出兩點之間多條可以選擇的安全路徑,并在這些路徑當中選擇一條最優(yōu)的路徑,決策出車輛行駛軌跡。執(zhí)行系統(tǒng)則為執(zhí)行駕駛指令、控制車輛狀態(tài),如車輛的縱向控制及車輛的驅動和制動控制,橫向控制是方向盤角度的調整以及輪胎力的控制,實現(xiàn)了縱向和橫向自動控制,就可以按給定目標和約束自動控制車運行。
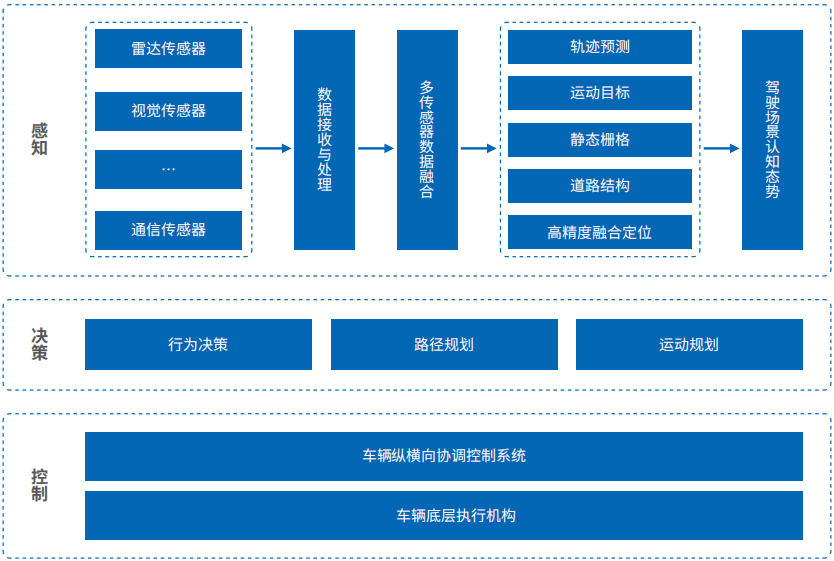
自動駕駛關鍵技術架構
分析智能座艙主要涵蓋座艙內飾和座艙電子領域的創(chuàng)新與聯(lián)動,從消費者應用場景角度出發(fā)而構建的人機交互(HMI)體系。智能座艙通過對數(shù)據(jù)的采集,上傳到云端進行處理和計算,從而對資源進行最有效的適配,增加座艙內的安全性、娛樂性和實用性。當前智能座艙主要滿足座艙功能需求,在原有的基礎上,對現(xiàn)有的功能或是分散信息進行整合,提升座艙性能,改善人機交互方式,提供數(shù)字化服務。智能座艙的未來形態(tài)是“智能移動空間”。在5G和車聯(lián)網(wǎng)高度普及的前提下,智能座艙與高級別的自動駕駛相融合,逐漸進化成集“家居、娛樂、工作、社交”為一體的智能空間。
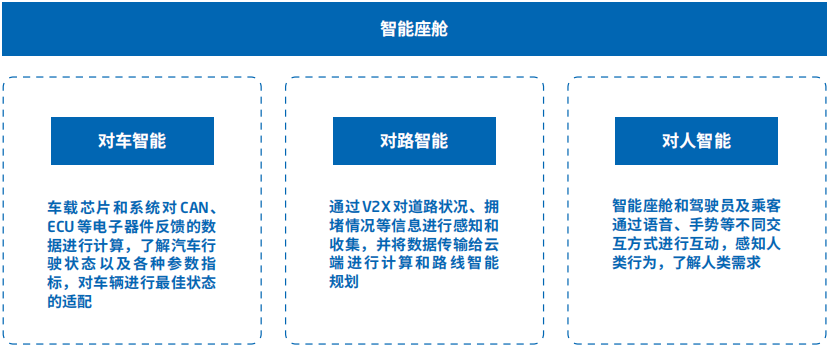
智能座艙關鍵技術分析
車聯(lián)網(wǎng)是以車內網(wǎng)、車際網(wǎng)和車載移動互聯(lián)網(wǎng)為基礎,按照約定的通信協(xié)議和數(shù)據(jù)交互標準,在“人-車-路-云”之間進行無線通訊和信息交換的大系統(tǒng)網(wǎng)絡,是能夠實現(xiàn)智能化交通管理、智能動態(tài)信息服務和車輛智能化控制的一體化網(wǎng)絡,是物聯(lián)網(wǎng)技術在交通系統(tǒng)領域的典型應用。在網(wǎng)聯(lián)化層面,按照網(wǎng)聯(lián)通信內容的不同將其劃分為網(wǎng)聯(lián)輔助信息交互、網(wǎng)聯(lián)協(xié)同感知、網(wǎng)聯(lián)協(xié)同決策與控制三個等級。目前行業(yè)內處于網(wǎng)聯(lián)輔助信息交互階段,即基于車-路、車-后臺通信,實現(xiàn)導航等輔助信息的獲取以及車輛行駛與駕駛人操作等數(shù)據(jù)的上傳。因此現(xiàn)階段車聯(lián)網(wǎng)主要指基于網(wǎng)聯(lián)輔助信息交互技術衍生的信息服務等,如導航、娛樂、救援等,但廣義車聯(lián)網(wǎng)除信息服務外,還包含用于實現(xiàn)網(wǎng)聯(lián)協(xié)同感知和控制等功能的V2X相關技術和服務等。
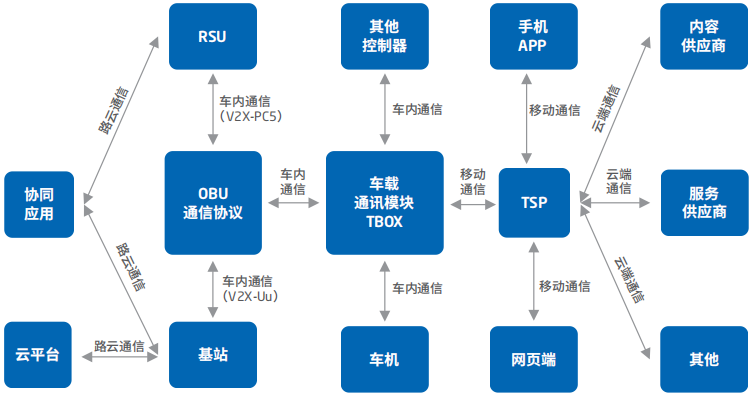
車聯(lián)網(wǎng)總體視圖
圖中展示了車聯(lián)網(wǎng)業(yè)務主要的參與端,包括汽車上的通訊終端T-Box、相關控制器以及車機,也包括后臺TSP(車聯(lián)網(wǎng)服務整合商)、手機APP、網(wǎng)頁端、內容提供商和服務提供商,還包括與路端通信的OBU、RSU和基站。其中,T-Box是汽車上唯一與外界通訊的橋梁,既實現(xiàn)了車內聯(lián)網(wǎng),也實現(xiàn)了車外通信;TSP是后端的整合部分,通常它既要提供基礎能力的管理(如賬號和鑒權),又要與各面向個端對接,實現(xiàn)服務的整合以及信息的傳遞;手機APP、網(wǎng)頁端以及車機都是直接用戶的觸點,承擔著與用戶交互的任務,是各個服務的體現(xiàn)點;內容和服務提供商是大部分數(shù)據(jù)的提供來源,他們是互聯(lián)網(wǎng)細分領域專業(yè)的提供者。
車載通訊模塊T-BOX架構中通常含有雙路高速CAN收發(fā)器,4G/5G/V2X模組以及可實時處理的高性能微處理器芯片,主要負責車內外通信服務,其中車聯(lián)網(wǎng)C-V2X技術應用展開場景應用類型與協(xié)同服務業(yè)務逐漸豐富,技術和應用的演進路線也從節(jié)點處理至更高級別復雜的應用方向發(fā)展。
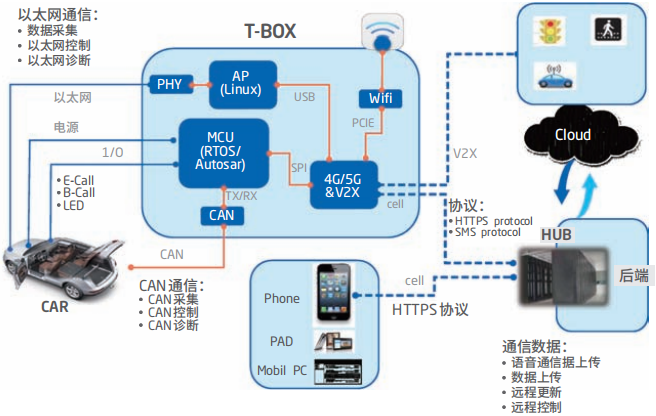
東軟車載通訊模塊T-Box架構示意圖
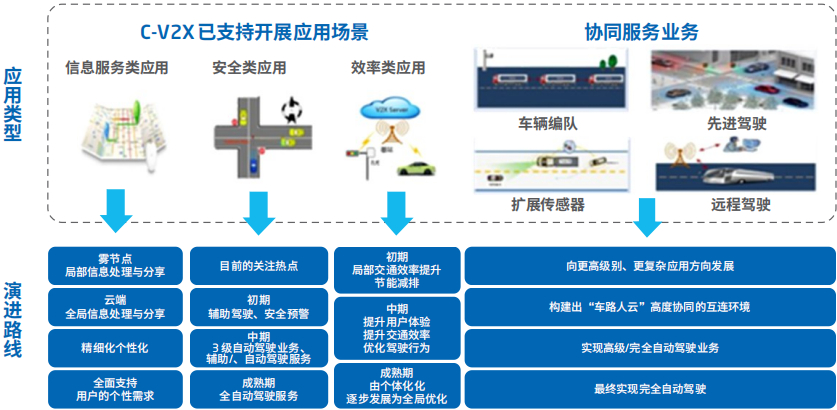
東軟車聯(lián)網(wǎng)C-V2X技術應用展開場景
高精度地圖(high-precision map),又稱高精地圖、自動駕駛地圖,是指具有高精度、地圖元素更加詳細、屬性更加豐富、面向機器人(智能車)使用的地圖。與傳統(tǒng)車載電子地圖相比,高精地圖精細程度更高。動態(tài)要素更為豐富。傳統(tǒng)的電子地圖誤差可達10 m,一般不含三維信息;而高精度地圖數(shù)據(jù)誤差通常在0.2 m以內且包含三維信息,不僅能夠輔助智能車完成匹配定位,還為自動駕駛系統(tǒng)的規(guī)劃層提供了車道級別的信息,進而幫助智能車實現(xiàn)厘米級的路徑規(guī)劃。
目前,自動駕駛用高精度地圖(厘米級),存儲密度非常高,整體容量已遠遠超出目前主流控制器方案的存儲容量,所以需要借助云儲存及云分發(fā)的形式才能得以實現(xiàn)。除此之外,傳統(tǒng)導航電子地圖的更新頻率為靜態(tài)數(shù)據(jù)(通常更新頻率為季度更新或月更新),準靜態(tài)數(shù)據(jù)(頻率為日更新)。而高精度地圖對數(shù)據(jù)的實時性要求較高,更新頻率通常為準動態(tài)數(shù)據(jù)(頻率為分鐘更新),實時動態(tài)數(shù)據(jù)(頻率為秒或毫秒更新)。
轉自智能汽車電子與軟件
